🎮 古墓丽影9手游(Tomb Raider 2013 重启版)2026 安卓/iOS 正式版
(注:目前官方为 预注册/预购 状态,预计发布日期为 2026 年 2 月 12 日)
🧠 游戏简介
《古墓丽影9》(Tomb Raider,指 2013 年重启版)是一款经典的动作冒险游戏,由 Crystal Dynamics 原版开发、Feral Interactive 移植。官方宣布该版本将于 2026 年 2 月 12 日 正式登陆 Android 和 iOS 平台。这不是简单的小游戏,而是 完整原版 加上全部 12 个 DLC 内容的完整版手游移植版。(九游)
📍 游戏特点:
✔ 重现原作剧情与解谜要素
✔ 涵盖战斗、解谜、平台动作、资源管理
✔ 全套 DLC、服装与额外挑战古墓
✔ 优化触控界面 + 支持手柄/键鼠控制
✔ 可自定义触控、陀螺瞄准等操作方式
✔ 全中文界面与操作适配(视地区上线情况而定) (Feral Interactive)
📸 游戏高清图 (可直接在 WordPress 显示)
🔥 主角劳拉·克劳馥在邪马台岛展开冒险
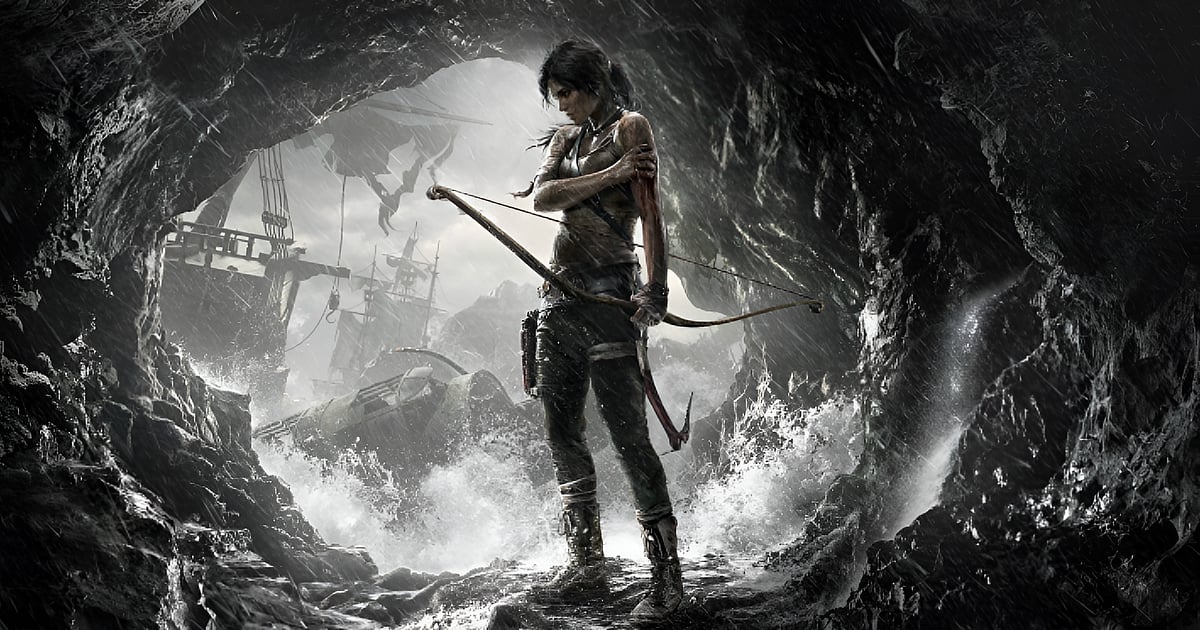
劳拉在险境中探索与战斗
🧗♀️ 原版经典场景:攀爬与解谜

动态动作与环境互动(示例图示,注:实际为原版画面参考)
💥 紧张激烈枪战与动作瞬间
敌人交火与爆炸场面
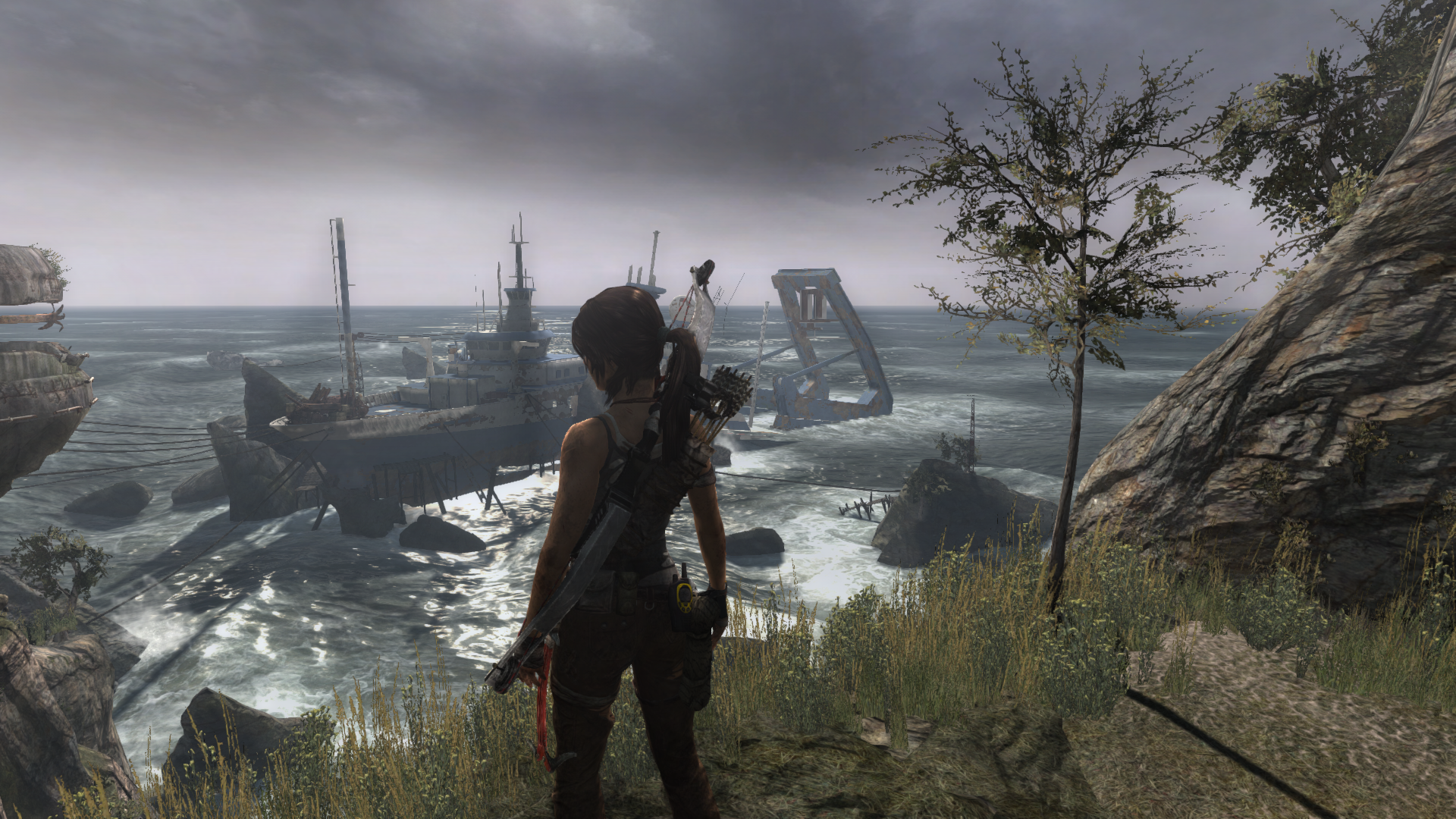
🌧️ 环境氛围与遗迹探索
雨林废墟与解谜路线设计
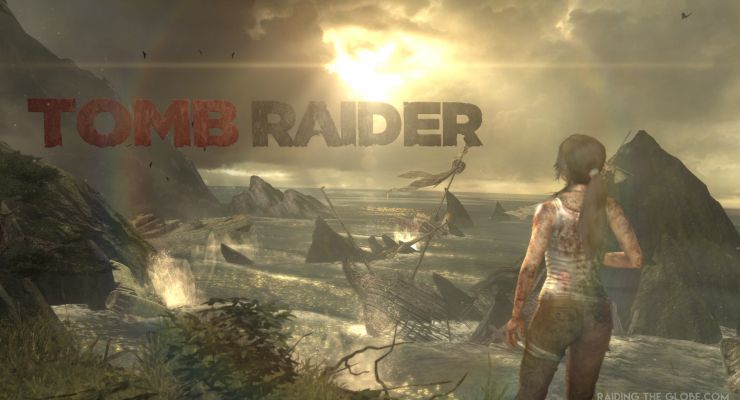
🏆 原版宣传大图(战斗与场景融合)

动作与画面细节高质量展示
📥 安卓/官方「下载」与预注册地址
❗ 到目前为止 还没有正式上线的 v2.9.2 安卓版下载(这个版本号是误传或不实说法)。
官方发布的是 即将上线的正版移动版,目前支持:
👉 Google Play 预注册(安卓)
搜索或访问 Google Play:
Tomb Raider
预注册游戏将在上线后自动通知并可下载安装。(九游)
👉 iOS / App Store 预购
可在 App Store 中搜索 Tomb Raider 进行预购(视地区可用)。(古墓丽影编年史)
📌 正版移动版售价:约 19.99 美元 / 15.99 欧元 / 12.99 英镑(不同地区定价略有差异)。(17173游戏新闻)
🧠 游戏核心玩法与特色
🎯 1) 极致动作与探索
- 劳拉·克劳馥将探索邪马台岛荒野遗迹
- 融合了攀爬、跳跃、滑索、潜行与战斗机制
- 解谜要素贯穿全程,需要灵活运用环境互动
📍 情节围绕求生与冒险推进,节奏紧凑兼具策略性。(IT之家)
🧩 2) 全套 DLC 与额外挑战
- 移动版包含完整原版故事之外的 12 个 DLC
- 包括新服装、武器、挑战古墓等
- 玩家可以体验更多可重复挑战内容
📍 官方强调这不是删减版,而是“完整版移植加内容”。(Ludens Media)
🎮 3) 操作与控制优化
- 深度优化触控控制界面
- 支持手柄/键鼠/陀螺瞄准操作(根据设备支持情况)
- 可自定义按键与交互布局
📍 针对移动平台体验进行了完整适配。(Feral Interactive)
🧠 新手基础攻略(移动版通用建议)
📍 1) 初期生存与探索
✔ 尽快熟悉移动触控操作与镜头控制
✔ 优先探索周边区域收集资源与补给
✔ 观察周围环境可触发隐藏解谜机制
🧠 2) 解谜与环境互动
🔸 多利用装备(绳索、冰镐)打开新路线
🔸 注意细节提示与光影线索,解锁隐藏路径
🔸 一些谜题可通过观察纹路/声响来提示
⚔️ 3) 战斗与战术
✔ 利用掩体与翻滚躲避敌火力
✔ 近战与远程武器灵活切换
✔ 节省资源,合理配置武器与道具
🎮 关于“v2.9.2 安卓版”说法
📌 当前官方并未公布过任何 “古墓丽影9 v2.9.2 安卓版” 这样的版本号或 APK 文件。
所有权威信息均来自官方公告和媒体报道,说明游戏为 2026 年上市的正版移动版,而不是现已发布的 2.x 版本。(九游)
网络上所谓的“2.9.2 APK”通常是误导性资源或第三方非官方发布,可能存在安全风险,不建议安装。
📢 推荐结尾(可直接复制)
🔥《古墓丽影9(Tomb Raider)》官方移动版已确认将于 **2026 年 2 月 12 日** 在 Google Play 和 App Store 发布。
📥 这款经典动作冒险游戏完整包含原版剧情与 **全部 12 个 DLC 内容**,并针对移动端深度优化控制体验。
📷 本文附有多张高清游戏截图,可直接展示游戏动作、环境与探索元素。
📌 目前支持安卓预注册与 iOS 预购,点击进入商店预约即可上线自动下载。
#古墓丽影9手游 #TombRaiderMobile #动作冒险 #安卓游戏 #官方正版
ℹ️ 总结
✔ 《古墓丽影9》官方移动版将于 2026 年 2 月 12 日 上线,并已开启预注册 / 预购。(九游)
✔ 移动版本为 完整原版 + 全 DLC 套装 携带优化操作。(17173游戏新闻)
✔ 当前不存在已发布的 “v2.9.2 安卓版 APK”。
✔ 正版移动版推荐通过 Google Play / App Store 安装。
发表回复